Build and install#
Overview#
Siconos software, once properly build and installed, consists in some dynamics libraries, c++ headers, a few scripts and python packages. To use the software, you need to fulfill some prerequesites, download build and install the package from sources.
Binaries for Debian are also available.
Installation from sources#
Prerequisites#
Whatever your system is, you will need first to :
Download the sources of Siconos as explained in Download Siconos.
Check Siconos required and optional dependencies. Most of them are commonly or at least easily installed on many standard systems.
The quick way#
If you do not want to bother with all installations details and only need a ‘standard’ siconos install (after ensuring the prerequisite described above):
cmake -S path_to_sources -B build-siconos
cmake --build build-siconos -j N
cmake --install build-siconos -j N
ctest --test-dir build-siconos # optional
N being the number of processes available on your system to run the compilation.
path-to-sources: full path to Siconos sources
build-siconos: the binary dir (where compilation, link, build take place). Choose any name/path. It must be different from path-to-sources.
If all went fine, you will get a full siconos installation as detailed in What will be installed? If not, step to Detailed installation.
To check the install, try
siconos --info
Detailed installation#
The first step of the installation process consists in running ‘cmake’
cmake -S path_to_sources -B build-siconos -DOPTION1_NAME=option1_value ...
This command will explore your system, to generate an appropriate configuration, and some makefiles for Siconos, taking into account some extra options, set as shown above. Many extra options exists to customize your build/install process of siconos.
The easiest way to handle Siconos options is to save them in a config file and to call cmake like this
cmake -S path_to_sources -B build-siconos -DUSER_OPTIONS_FILE=option_file.cmake
Examples of options files are available in the directory config_samples of Siconos source dir. To write your own file, just copy the file default.cmake somewhere and modify it according to your needs.
Choose any place/name for build-siconos, the only requirement is that it must be different from path_to_sources. This is a temporary directory that can be removed once the installation is done.
Note
In place of the command-line cmake, you can also run:
ccmake path_to_sources ...
to open some dialog-interface to cmake configuration. ‘cmake-gui’ is also another option. For details check cmake documentation : https://cmake.org/runningcmake/ .
Once the cmake process is done, generated files stay in build-siconos, including a Makefile and a CMakeCache.txt. The latter contains all the variables set during configuration. Do not forget to check the screen output of cmake to be sure that everything went fine.
Then you are ready to build siconos libraries and binaries:
cmake --build build-siconos -j N
Or if you want to build a single target:
cd build-siconos
make target_name -j N
All available targets are obtained with:
make help
Optionnaly (if WITH_TESTING is ON), you can run tests to check you build. See Running siconos tests.
The last step is the installation of all required libraries, headers and so on in the right place:
cmake --install build-siconos -j N
By default, everything will be installed
in your python env if it exists ($CONDA_PREFIX or $VIRTUAL_ENV)
in $HOME/.siconos if not. In that case, add $HOME/.siconos/bin to your PATH so that siconos command can be found, e.g.:
export PATH=$HOME/.siconos/bin:$PATH
Run
siconos --info
to collect information about Siconos installation.
Note
By default, no root privileged are required to run Siconos installation.
We strongly recommend to retain the default installation mode, but there are other options:
use option SICONOS_INSTALL_SYSTEM_WIDE=true to install the software in the standard paths (/usr/local …). This requires root privileges
use SICONOS_CUSTOM_INSTALL=<someplace> to customize Siconos installation path. Siconos binaries and libs will go to <someplace>. In that case, if ISOLATED_INSTALL=false (default) Siconos Python packages will remain in the default python install path. If ISOLATED_INSTALL=true, everything (including Siconos Python packages) will be installed in <someplace>
What will be installed?#
Note
Check the output of cmake to get info on where things will be installed for your current config
We denote siconos_install_path as the Siconos install root dir
default:
siconos_install_path = $CONDA_PREFIX or $VIRTUAL_ENV if they exist
siconos_install_path = $HOME/.siconos if not
siconos_install_path = <someplace> if SICONOS_CUSTOM_INSTALL=<someplace> option was used with cmake
Then, the following files will be installed:
siconos_install_path/lib/ with all shared libraries of the siconos components you asked for.
siconos_install_path/include/siconos/ with all headers files needed by siconos
siconos_install_path/share/siconos/ : extra files like cmake configuration, doc or anything that may be required at runtime
siconos_install_path/bin/siconos : a script to run siconos simulation (see Test your installation).
Python Siconos packages:
By default in the current default Python site-package ($CONDA_PREFIX, $VIRTUAL_ENV or user site), e.g. $HOME/siconosenv/lib/python3.10/site-packages or $HOME/.local/lib/python3.10/site-packages
if SICONOS_CUSTOM_INSTALL=<someplace> and ISOLATED_INSTALL=true in someplace/lib/python3.XY/site-packages (XY being your Python version)
Warning
if siconos_install_path is not a standard path of your system, you may need to set some environment variables, mainly:
append siconos_install_path/bin to PATH
append path to Siconos Python packages to PYTHONPATH
Siconos package description#
Siconos software is made of different components described below
externals : API or tools related to external software libraries used by Siconos.
numerics (C and Python api). A collection of low-level algorithms for solving basic Algebra and optimization problem arising in the simulation of nonsmooth dynamical systems.
kernel (C++ and Python api), used to model and simulate nonsmooth dynamical systems.
control (C++ and Python api) : control toolbox
mechanics (C++ and Python api) : toolbox for collision detection and joints
mechanisms (C++ and Python api) : toolbox for collision detection and joints (legacy version, won’t be sustained in long term)
io (C++ api) : tools related to input/outputs (hdf5, vtk …)
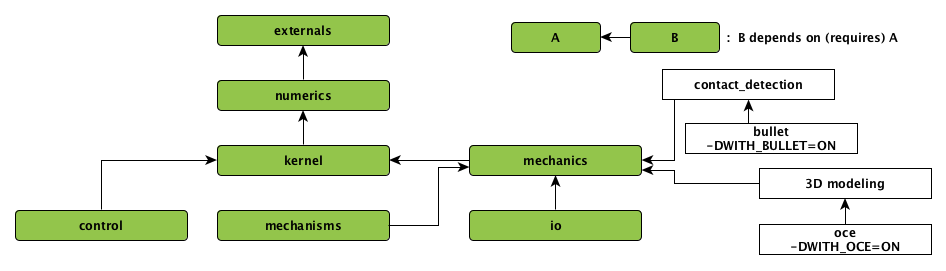
The list of components to be installed can be set using siconos_install_with_user_options (mind the dependencies shown in the figure above).
Running siconos tests#
To enable tests, use the option WITH_TESTING=ON when running cmake.
Then to run all tests:
cd build-siconos
make -j test
To run only a set of tests, for example number 10 to 14:
ctest -VV -I 10,14
‘-V’ or ‘-VV’ is used to enable verbose and extra verbose mode. For other options, try ‘man ctest’ or check ctest documentation, https://cmake.org/documentation/.
To get a list of all available tests:
ctest -N
To run python tests only:
cd build-siconos
py.test
Or in verbose mode:
cd build-siconos
py.test -s -v
Just a specific python test:
cd build-siconos
py.test -s -v wrap/siconos/tests/test_lcp.py
- Concerning py.test, see http://pytest.org/latest/ or::
py.test -h
Developers or advanced users options#
WARNINGS_LEVEL: to set compiler diagnostics level.
0: no warnings (default)
1: activate many standard warnings (Wall, Wextras …). This should be the setup for developers.
2: strict level, turn warnings to errors and so on.
WITH_MUMPS=ON/OFF : to enable/disable mumps library (http://mumps.enseeiht.fr)
WITH_FCLIB=ON/OFF : to enable/disable fclib interface (FrictionalContactLibrary/fclib). This option is ON by default. The last version of fclib (master branch of the github repository) will be downloaded and installed automatically as part of Siconos If you need a specific version or prefer using a version already installed on your system, add the following option to your cmake command:
cmake -DFCLIB_ROOT=<path-to-your-fclib-installation> ...
WITH_BULLET=ON/OFF : enable/disable bullet (http://bulletphysics.org/wordpress/) for contact detection.
Bullet minimal required version is 3.17.
WITH_BULLET can be replaced by Bullet_ROOT=<some_path> to specify the path to your Bullet installation.
Moreover, if you don’t want to bother you with Bullet install, run
cmake -DBULLET_INSTALL=ON ...
Bullet will be downloaded, built and installed as a siconos part, at the same place as Siconos.
Last option, you can use the script ci_gitlab/Dockerfiles/install_bullet.sh to install Bullet 3.21 on your system (need to be root or sudo).
export CI_PROJECT_DIR=<some path where bullet will be cloned and built> source ci_gitlab/Dockerfiles/install_bullet.sh
WITH_OpenCASCADE=ON/OFF : enable/disable OpenCascade bindings (tpaviot/pythonocc-core)
Note
for most of the required or optional dependencies, you can add some hints regarding their installation path to help cmake find them by using the option ‘XXX_ROOT=<install_path>’, XXX being the name of the package to be searched. For example:
cmake -DFCLIB_ROOT=...
Test your installation#
When all the installation process is done, you can test your installation by running a simple example. (for non-standard installation path, mind siconos_install_note.). Try one of the numerous files provided in `Siconos Tutorial project<https://gricad-gitlab.univ-grenoble-alpes.fr/nonsmooth/siconos-tutorials/examples>`_
git clone https://gricad-gitlab.univ-grenoble-alpes.fr/nonsmooth/siconos-tutorials
cd siconos-tutorials/examples/mechanics/BouncingBall
siconos BouncingBallTS.cpp
You can also test all examples in a raw:
git clone https://gricad-gitlab.univ-grenoble-alpes.fr/nonsmooth/siconos-tutorials
cmake -S siconos-tutorials/examples -B build-examples
cmake --build build-examples -jN
ctest --test-dir build-examples
This will compile, link and execute all the examples distributed with siconos.
Check Running a simulation for more details on siconos script.
Repositories#
Install Siconos using the official repositories. We provide packages for the distributions listed below.
Warning
The packages below are not frequently updated and the Siconos versions available might be outdated.
Debian bullseye#
(thanks to Steven Sinclair’s work)
apt install siconos
FreeBSD#
(thanks to yurivict, yuri@freebsd)
pkg install siconos