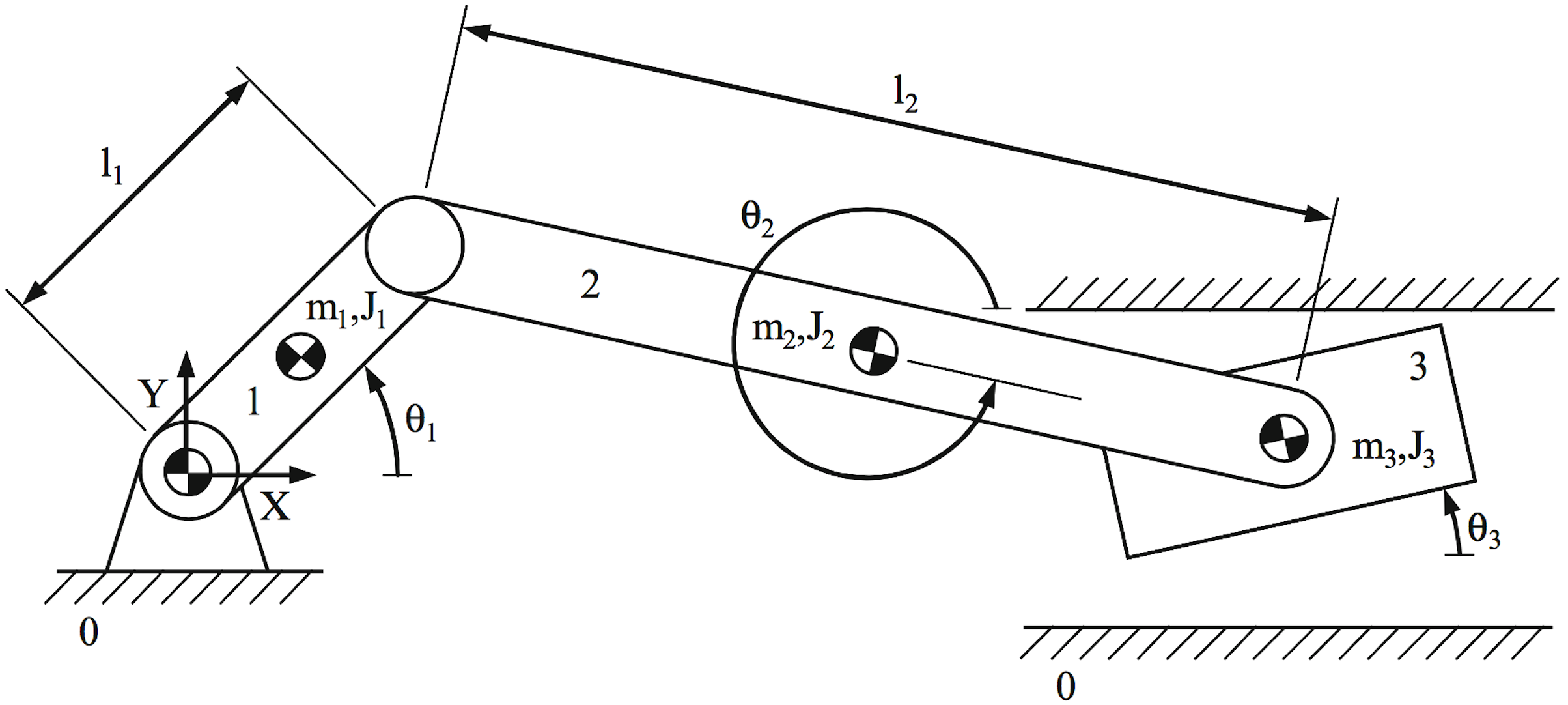
Slider Crank#
This is an example of a simple multibody system, developed in [7] and shown on the figure below:
In siconos, this example is simulated in several different ways :
examples/Mechanics/SliderCrank/SliderCrankMoreauJeanOSI.cpp
examples/Mechanics/SliderCrank/SliderCrankD1MinusLinear.cpp
examples/Mechanics/SliderCrank/SliderCrankD1MinusLinearVelocityLevel.cpp
examples/Mechanics/SliderCrank/SliderCrankMoreauJeanCombinedProjectionOSI.cpp * examples/Mechanics/SliderCrank/SliderCrankMoreauJeanDirectProjectionOSI.cpp
examples/Mechanics/Mechanisms/SliderCrank/bodyref.py
Usage#
siconos example_name.cpp
or, for python files using mechanisms toolbox:
cd examples/Mechanics/Mechanisms/
siconos -P siconos-mechanism.py .
and to plot the results, you can use for example:
gnuplot -p result.gp
This must lead to Fig 11 (d) of the paper
The example is based on cad files located in examples/Mechanics/Mechanisms/SliderCrank/CAD
The option WITH_CLEARANCE_ON_RODE can be set to 1 to add clearance between the rode 1 and 2.
All variables names and parameters values are those from the paper cited above.